









Download het artikel in ![]()
ENGINEERINGNET -- Eindeloze mogelijkheden, die in grote mate mogelijk zullen zijn doordat de machines 'zintuigen' krijgen. Zo wordt veel verwacht van de 3D-visietechnologie.
Visie is een van de meest toegepaste applicaties waar het gaat om robots met 'zintuigen'. Dit type toepassing is van oorsprong ontstaan op de werkvloeren van productiebedrijven, waar componenten worden geassembleerd en waar materiaalbeheer wordt ingezet.
Een camera is er noodzakelijk om een beeld te verkrijgen van bijvoorbeeld een component of een locatie. Vervolgens worden de coördinaten naar de robot gestuurd om een bepaalde handeling uit te voeren. Denk hierbij aan het oppakken en verplaatsen van een onderdeel.
Het toevoegen van visie aan een dergelijke applicatie maakt de machine dan een flink stuk flexibeler. Maar, als er een hoge nauwkeurigheid van de beweging noodzakelijk is, dreigen camera’s of mechatronische systemen al snel heel duur te worden.
Het gevolg is dat veel visiegeleide robotsystemen gebruik maken van slechts één enkel beeld dat op het moment dat een taak moet worden uitgevoerd, wordt gegenereerd, zonder enige vorm van real time terugkoppeling.
 Een methode om dit betaalbaar op te lossen bestaat overigens: visuele servobesturing (visual servo control). Hierbij is de camera gekoppeld aan de robot zelf en is er een continue visuele feedback om kleine bewegingscorrecties door te voeren wanneer er fouten worden geconstateerd.
Een methode om dit betaalbaar op te lossen bestaat overigens: visuele servobesturing (visual servo control). Hierbij is de camera gekoppeld aan de robot zelf en is er een continue visuele feedback om kleine bewegingscorrecties door te voeren wanneer er fouten worden geconstateerd.
De verwachting is dat de volgende decennia de visie/robot-combinaties vooral buiten de productieomgeving sterk in aantal zullen toenemen. Een voorbeeld waar deze groei nu duidelijk zichtbaar is, is het domein van de mobiele robot.
Denk hierbij aan servicerobots die door de hallen van ziekenhuizen zwerven of aan de autonome tractoren die landbouwgronden ploegen. Het is niet verwonderlijk dat vrijwel iedere autonome mobiele robot geavanceerde beeldverwerkingscapaciteiten aan boord heeft.
Zij het om botsingen met obstakels te vermijden, of voor het simultaan visueel bepalen van een locatie. Het komende decennium zal het aantal visiesystemen dat op autonome robots wordt ingezet, zijn evenknieën in vast opgestelde robot-configuraties naar alle waarschijnlijkheid (ver) overtreffen.
3D-visietechnologie
Een groeiende tendens waarmee robots worden geholpen in het waarnemen van hun omgeving, is het toepassen van 3D-visie. Deze beeldtechnologie komt van ver en heeft haar wortels binnen de academische onderzoekslaboratoria.
De innovaties van de afgelopen jaren op het gebied van sensoren, verlichting en - waarschijnlijk het belangrijkste - op het vlak van embedded verwerking, heeft er toe geleid dat 3D-visie vandaag al in de meest uiteenlopende applicaties worden ingeschakeld. Deze toepassingen gaan van door visie geleide robotmatige bin-picking tot aan extreem nauwkeurige metrologie en mobiele opstellingen.
De processortechnologie staat vandaag zo ver dat ze in staat is om de immense databestanden en geavanceerde algoritmen te verwerken die nodig zijn om voldoende snel real time beslissingen te nemen om bewegende machines aan te sturen. En de rekenkracht neemt elk jaar toe. Zo hebben mobiele robots diepte-informatie nodig om de grootte en de afstand tot obstakels te meten voor het uittekenen van nauwkeurige routes en om botsingen met voorwerpen te vermijden.
Deze stereovisiesystemen maken grote bestanden met 3D-informatie aan voor navigatietoepassingen en leveren die zelfs onder wijzigende verlichtingssituaties netjes af. Stereovisie maakt daarbij gebruik van twee of meer op verschillende plaatsen staande camera’s die allemaal naar hetzelfde object kijken. De ongelijkheid en de diepte-informatie die uit het vergelijken van de camerabeelden naar voren komen, worden vervolgens gebruikt om de 3D-informatie af te leveren.
Meer prestaties
De hogere prestaties van embedded logic hebben weliswaar geleid tot de mogelijkheid om dit type processoren voor 3D-visie met robotica te combineren, maar het gaat slechts om de eerste stappen van een beloftevolle technologie. Er blijft enorm veel ontwikkeling nodig.
Zo zijn er bijvoorbeeld applicaties waar nog méér van de systemen worden geëist, waar nog meer prestaties nodig zijn. Een voorbeeld van zo'n onderzoeks- en ontwikkelingsdomein is het operatiekwartier.
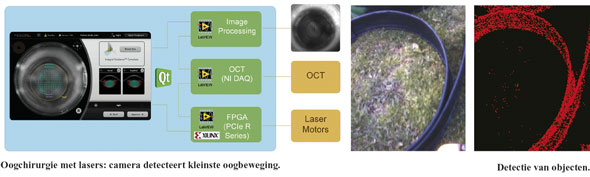
Een mooie illustratie waarbij FPGA’s - Field Programmable Gate Arrays - zijn gebruikt om de beelden voor te bewerken en om de beeldinformatie terug te koppelen naar zeer snelle besturingen, is de zorgvuldig synchronisatie van de robot en de besturing van een laser via beelden.
FPGA’s zijn uitstekend toegerust voor sterk deterministische en parallelle beeldverwerkingsalgoritmen en het zorgvuldig synchroniseren van verwerkingsresultaten met een mechatronisch systeem of een robot.
Een recent hoogstandje is te vinden in de oogchirurgie, waar camera's via lasers de kleinste bewegingen in het oog van de patiënt detecteren. Deze informatie wordt vervolgens gebruikt als terugkoppeling om het haptische systeem aan een zeer hoge snelheid volautomatisch te focussen.
Software is de uitdaging
De combinatie van robotica en visie zorgt alvast voor belangrijke software-uitdagingen. Neem als voorbeeld de mobiele robot die gebruik maakt van een industriële robotarm om vliegtuigen automatisch van brandstof te voorzien. Hier hebben we niet alleen te maken met een robot- en een visiesysteem, maar ook met sensoren, motoren voor de wielbesturing, pneumatiek en de veiligheidssystemen.
Dit voorbeeld laat zien dat de gebruiker nog altijd noodgedwongen gebruik moet maken van merkgebonden (programmeer)talen, protocollen en zelfs ontwikkelomgevingen, waarbij zelfs de verdeling tussen de verschillende subsystemen niet altijd even transparant is. Er is dus nog werk aan de winkel !
(foto's: National Instruments)

